發布日期:2022-05-20 點擊率:137 品牌:組態王_Kingview
0 引言
射頻識別技術(RFID)能夠實現物與物之間無接觸式信息傳遞,即閱讀器通過天線與電子標簽進行數據交互。目前廣泛采用無源有芯或者有源有芯電子標簽,但其成本較高,無芯片RFID標簽應運而生。因目前RFID防碰撞算法主要針對有芯片標簽[1-3],均基于閱讀器主動控制標簽休眠,而無芯片RFID標簽內無IC芯片,只是擁有特定材質有限大小的結構,因此大部分RFID防碰撞算法在無芯片RFID的應用中失效。本文利用Carl E. Baum提出的極點展開法(the Singularity Expansion Method,SEM)[4-5]來研究標簽散射場特性[6-8],進一步應用改進型矩陣束算法解決多個標簽防碰撞問題,分析算法在無芯片RFID多標簽識別中的有效性。
1 相關理論
1.1 散射電磁場的SEM建模
1971年Carl E. Baum將傳統電路理論中用留數定理求解瞬態響應的方法推廣到瞬態電磁場問題處理中,提出了SEM,其理論表明電磁波照射金屬導體時,瞬態響應后期可以被看成一系列衰減復指數和的形式:

其中es(t)為后向散射的時域信號,M為極點個數,Ri是信號的留數,si為信號的復極點,一般取si=ai+jwi(ai取負數,稱為阻尼因子或衰減因子;wi取正數,為自然諧振角頻率)。由于散射信號是實數,所以極點總是以共軛對的形式存在。
同樣,多標簽散射場也具有相同特性,若查詢信號頻帶覆蓋了多個標簽的自然諧振頻率,由標簽感應產生的后向散射回波信號電場es時域表示為:
式(2)和(3)中,r和t分別表示檢測回波信號的位置和時間,M為所查詢標簽個數,em(Em)為第m個標簽的早時響應,U(t)為單位階躍函數,tm和Nm分別為第m個標簽的后時響應開啟時間和極點共軛對數目,第m個標簽的第n個復極點和留數分別為sm,n和Rm,n。
在復頻域中,信號的特征通過極點和留數來表征,而極點和留數的大小只與金屬導體的形狀有關,與激勵源無關。所以標簽結構與極點呈現出一一對應關系,標簽的檢測與識別的關鍵技術之一是從es(t)中提取信號的極點。
1.2 改進矩陣束算法(MPM)
目前,極點提取算法有多種,比如Prony方法、矩陣束算法[9-12]、短時矩陣束算法[13]等。實際情況中,Prony算法抗噪性能差,矩陣束算法采用內積形式研究極點提取問題,使抗噪能力有所提高。
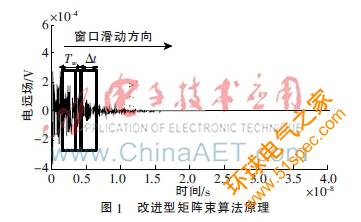
在多標簽防碰撞算法中,對傳統矩陣束算法進行以下改進:如圖1所示,在散射場時域信號es(r,t)中加一寬度為Tw的虛擬窗口,窗口每次滑動?駐t,同時應用一次矩陣束算法(MPM)計算極點和留數,直到窗口內無數據。由于早時響應的存在,早時期間極點處于不穩定狀態,而后時響應期間極點會保持穩定,根據穩定的極點識別出標簽。
2 多標簽防碰撞設計及仿真結果
2.1防碰撞標簽結構的建立

為了研究無芯片RFID多標簽防碰撞相關問題,利用方形開槽結構標簽建立仿真模型,如圖2所示(尺寸單位:mm)。槽的長度決定諧振頻率和衰減因子,標簽1尺寸:L=45,H=10,L1=27,L2=30,L3=33,w=0.2;標簽2尺寸:L=30,H=10,L1=18,L2=20,L3=24,w=0.2。
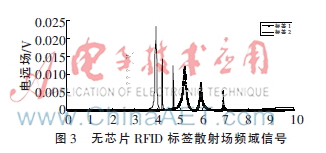
實驗采用電磁仿真軟件FEKO 5.5分別對標簽1標簽2進行仿真,得到其在50 MHz~10 GHz頻域散射場信號數據,采樣數據點數均為1 024。如圖3所示,標簽1散射場極點分布大約在5.2 GHz、5.9 GHz、6.9 GHz,標簽2散射場極點分布大約在3.95 GHz、4.2 GHz、4.7 GHz。最后將標簽1和標簽2同時進行仿真,并設置兩標簽間隔距離為2 m。
2.2 無芯片RFID標簽防碰撞的實現
2.2.1 改進型矩陣束算法參數選擇
利用改進型矩陣束算法提取散射場信號極點時,需要選擇合適的窗口寬度Tw和每次滑動的寬度`4LSDHG55A3EE)B.jpg") t。窗口寬度Tw的選擇可以根據采樣點數N和時間總長T來決定,即Tw=T/N,此處Tw取0.04 ns較合適。經過多次實驗,一般
t。窗口寬度Tw的選擇可以根據采樣點數N和時間總長T來決定,即Tw=T/N,此處Tw取0.04 ns較合適。經過多次實驗,一般`4LSDHG55A3EE)B.jpg") t≤Tw時,極點提取的效果比較理想,此處
t≤Tw時,極點提取的效果比較理想,此處`4LSDHG55A3EE)B.jpg") t取0.01 ns。窗口寬度Tw和滑動寬度
t取0.01 ns。窗口寬度Tw和滑動寬度`4LSDHG55A3EE)B.jpg") t的選取直接影響到極點提取的精度,也將會影響多標簽識別的準確性。
t的選取直接影響到極點提取的精度,也將會影響多標簽識別的準確性。
2.2.2 無芯片RFID多標簽的識別
標簽結構如圖2所示的標簽1和標簽2的混合散射場時域信號如圖4所示,應用改進型矩陣束算法提取其極點,獲得極點的虛部與時間的關系(即諧振頻率與時間的關系),如圖5所示。
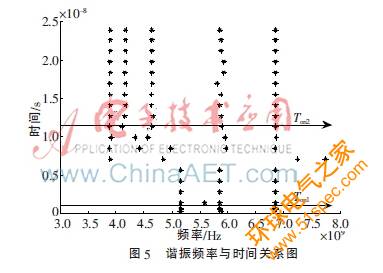
從圖5中可以看出,早時響應期間(tTon2期間)。由此可知,根據標簽后時響應開啟時間Ton的不同,標簽可以被準確區分,解決了后時響應開啟時間不同的多標簽防碰撞問題。
3 結束語
本文將矩陣束算法進行改進并應用于無芯片RFID多標簽防碰撞的研究中,在研究防碰撞的同時找出了標簽的后時響應開啟時間,根據各個標簽散射場后時響應開啟時間的不同,從標簽散射場的諧振頻率和時間關系中,準確地識別各個標簽。此種方法對無芯片標簽的識別以及多標簽防碰撞有一定參考價值。但是此種方法有一定局限性,即針對各個標簽距離閱讀器距離幾乎相等(后向散射開啟時間近似相同)時,標簽將無法被準確識別.
下一篇: PLC、DCS、FCS三大控
上一篇: 一種基于RFID的涉密載


