發布日期:2022-10-09 點擊率:68
引言
由于光柵尺移動時輸出信號的頻率大約在5~25 kHz之間,且后續電路要求信號基本穩定,無振蕩,因此該絕對值電路應滿足以下條件:1)能夠在較高頻率下正常工作;2)適用于高速化的場合;3)精度較高,信號基本無失真。要保證測量誤差在允許范圍之內,信號在經過絕對值電路后必須高度保真。通過上述電路分析和比較,綜合各種因素可知,第三種絕對值電路應是最佳的選擇。
為了達到較高的細分倍數,在對光柵莫爾條紋信號進行粗細分的同時,還需要對位移進行精細分。為提高細分速度,精細分電路采用全硬件設計,包括絕對值電路,多路選擇電路及A/D采樣電路。絕對值電路是模擬電路中處理數據信息的一種電路,在各類電子測電路中有著廣泛的應用。尤其在對正弦信號進行數字化幅值測量時,采用絕對值電路可以將雙極性信號轉換為單極性信號,便于計算機采集處理時去掉符號位,提高模數轉換的精度。所以絕對值電路精確與否,對后續的信號處理電路有著重要的影響。然而,在實際使用中,由于二極管壓降的存在,信號頻率的不同,以及元器件參數誤差等因素的影響,絕對值電路的輸出往往不夠理想,有時甚至嚴重失真,將在一定范圍內影響測量精度。為此,本文著將重探討幾種不同的絕對值電路,以確定出符合要求的最佳電路。
1 三種絕對值電路的設計方案
1.1 電路設計一
資料上如圖1所示的絕對值電路較為常見。分析電路可知,當Vin>0時,D1截止,D2導通,輸入信號Vin通過第一級運放U1A反相放大,之后再與Vin一起進入后一級運放U1B構成反相加法器,根據電阻匹配關系,最后輸出為Vout=Vin;當Vin<0時,D1導通,D2截止,此時運放U1A處于深度負反饋狀態,所以輸入信號Vin直接經過運放U1B反相后,得到輸出Vout=-Vin。

圖1 簡單結構的絕對值電路
在實際電路中,由于電源存在耦合干抗,零電位產生漂移,加之二極管并非理想狀態,導通時存在一定壓降,該絕對值電路效果往往不夠理想。特別是當輸入信號頻率較高時,在過零點處會產生明顯的失真,從而給信號的后續處理帶來極大的不便。
圖2是當信號頻率為4 kHz時的輸出波形圖,由圖可知,在過零點處,幅值誤差為△U=40 mV,假設精細分電路對信號進行256細分,信號幅值為0.5 V。由于光柵尺移動一個柵距位移為0.02mm,則所允許的誤差δ應小于0.02 mmx1/4x1/256=0.019 5 μm,而當△U=40 mV時,誤差δ=0.02mmx1/4x1/256x(256x0.04V/0.5V)=0.000 4 μm,明顯超出了測量誤差所允許的范圍。
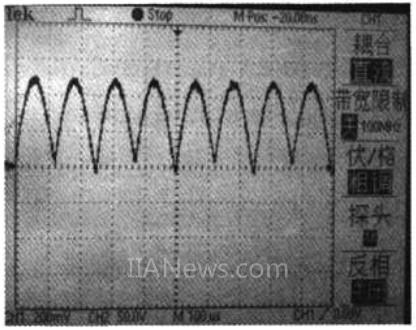
圖2 電路-輸出波形圖
[DividePage:NextPage]
1.2 電路設計二
圖3為改進后的絕對值電路,該電路在電源端分別接一個0.1μF的電容去耦;在運放的同相輸入端采用圖中電路結構,不僅可以通過調節電位器使零電位趨于穩定,抑制零點漂移,還能對波形的銜接處進行調整;當信號頻率增大時,運放芯片會使信號產生一定的延遲,即相位發生偏移,而圖中電容C1與電阻構成的電路會引起反相延遲,從而能對信號相位進行校正。

圖3 可調整失調的絕對值電路
當輸入信號頻率為8 kHz時,輸出波形圖如圖4所示。

圖4 輸出波形圖

圖5 信號頻率為10kHz時輸出波形圖
當信號頻率增大到一定值時,電路二的輸出同樣會出現失真。例如,當輸入信號頻率為10kHz時,其輸出波形如圖5所示。由波形圖可知,信號在過零點處的誤差達到了約80 mV,顯然不合要求。
[DividePage:NextPage]
1.3 電路設計三
由于光柵尺輸出信號的頻率最高能達到20 kHz以上,且隨著光柵尺移動速度的不同,信號頻率變化也較大,因此要求絕對值電路能對高頻信號進行精確處理,并能在動態條件下穩定工作。第二種電路雖然在結構上有所改進,但對高頻信號的處理效果仍不理想,如圖5所示,不能達到所需要求,而圖6所示的第三種絕對值電路可以很好地解決這一問題。
與之前電路相比,該電路在電源去耦,濾波處理,以及各元器件型號和參數的選擇上都有較大的改進。另外,為減小差動放大器上來的信號源電阻,在二極管D1、D2的輸出上附加470 Ω的分流電阻。在高頻信號輸入以及高速化的工作條件下,該電路能對信號進行較好地處理,使輸出信號的幅值衰減很小,且過零點處信號基本無偏差。

圖6 高速化的絕對值電路
當輸出信號頻率為25 kHz時,該電路的輸出波形圖如下:

圖7 輸出波形圖
2 結論
由于光柵尺移動時輸出信號的頻率大約在5~25 kHz之間,且后續電路要求信號基本穩定,無振蕩,因此該絕對值電路應滿足以下條件:1)能夠在較高頻率下正常工作;2)適用于高速化的場合;3)精度較高,信號基本無失真。要保證測量誤差在允許范圍之內,信號在經過絕對值電路后必須高度保真。通過上述電路分析和比較,綜合各種因素可知,第三種絕對值電路應是最佳的選擇。
下一篇: PLC、DCS、FCS三大控
上一篇: 電磁傳感器的實際應用


