當前位置: 首頁 > 工業控制產品 > 運動控制 > 工業機器人 > 直角坐標型工業機器人
發布日期:2022-04-18 點擊率:515
近年來機械自動化進程加快,隨著圖像識別技術及自動控制技術的廣泛應用,大批工業用機器人孕育而生。這些機器人一方面可以將生產一線的工人從重復單調的生產工作中解放出來,另一方面也在蠶食著大量就業崗位,造成了一定的社會問題。
科學給我們帶來的沖擊從未如此巨大。18世紀的工業革命,通過圈地運動使大量的農民失去了土地,但同時也創造了大量的新型就業崗位。但是機器人在取代了大量的工人同時,卻似乎無法在短期內創造出等量的就業崗位。這確實是一個值得深思的問題。
這個問題并不是這篇文章要探討的重點,今天我要談一下機器人是如何通過模仿人類的動作,逐步替代人工的。我們首先需要理解一個概念叫“自由度”,所謂自由度是指一個物體在空間中的三個正交方向轉動的能力。這個概念不易理解,我們來看一個例子。以人的手臂為例,手臂包含上臂和下臂,通過肩關節、肘關節、腕關節相連接。如下圖所示。
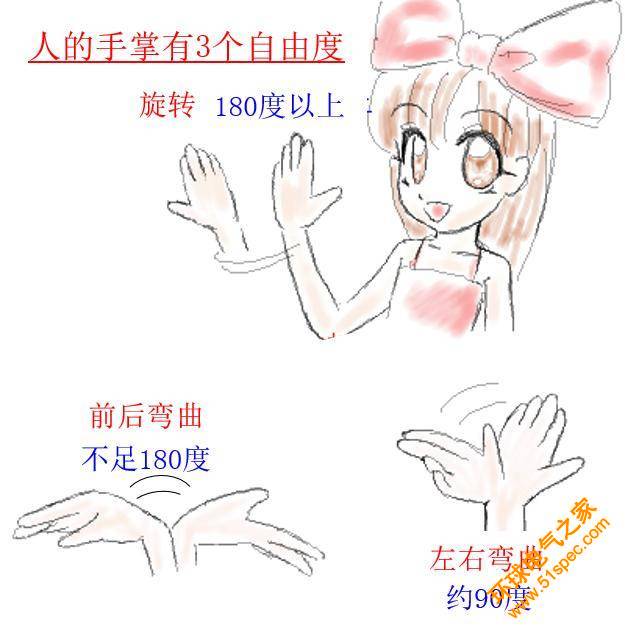
腕關節的自由度

肘關節的自由度
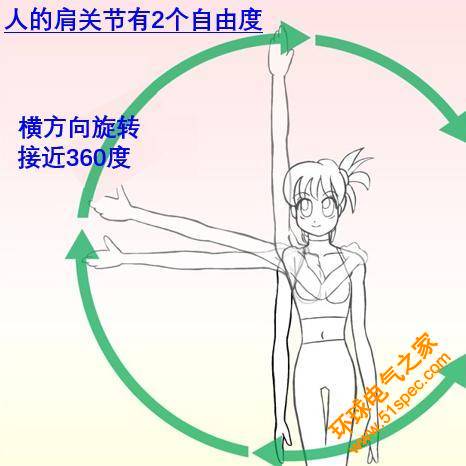
肩關節的自由度
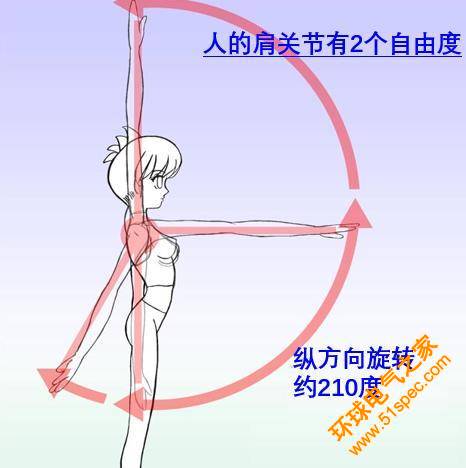
肩關節的自由度

第7自由度
通過以上圖片,我們對自由有了一個大概的印象。也知道了人的手臂具有7個自由度。以此基礎,我們再來看看工業用機器人的結構。下圖是一個典型的6軸工業機器人。這里的軸是由電機+減速器組成的,表示這臺機器人有幾個部位可以旋轉,因此也可以將其理解為6個自由度。如下圖所示。

工業6軸機器人
R軸、B軸、T軸共同組成了類似于人類腕關節的機構;U軸類似于人類的肘關節;L軸和S軸組成了類似于人類肩關節的機構。從運動范圍來說,6軸機器人似乎更勝一籌。以下我隨意找了一個6軸機器人的參數與人類手臂進行了對比,除了S軸以外,6軸機器人的活動范圍均超過人類。
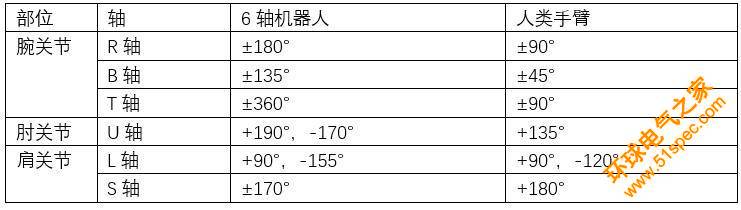
也許有人覺得,人類有7個自由度,你所說的工業機器人只有6個自由度。誠然如此,但是機器人不會累,不要工資,相比之下損失一個自由度又如何呢。況且現在已經出現了7軸聯動機器人,人類的優勢已經越來越弱。
但是我們也不必過于擔憂。宗薩蔣揚欽哲仁波切曾說過,他并不擔心機器人會取代人類,因為人類能夠感受痛苦和快樂,而機器人不能;人類有煩惱,機器人沒有。如果有一天機器人真的能夠感受痛苦,有了煩惱,具有了人性的弱點,那么他就不再是一個機器了,就像電影《機器管家》一樣。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


