發布日期:2022-04-18 點擊率:96
(1)原理圖
略。
(2)工作臺縱向進給操縱機構圖
(3)1臺進給電機拖動工作臺六個方向運動示意圖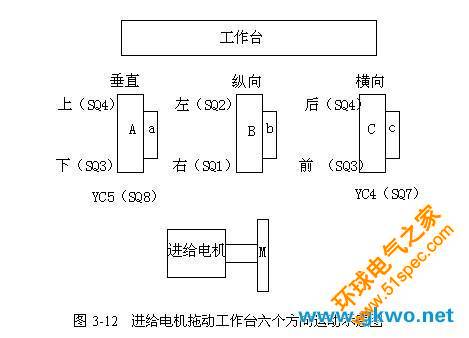
(4)工作原理分析
條件:將電源開關Q1合上,起動主軸電機M1,接觸器KM1吸合自鎖,進給控制電路有電壓,就可以起動進給電動機M3。
①工作臺縱向(左、右)進給運動的控制分析
先將圓工作臺的轉換開關SA3扳在“斷開”位置,這時,轉換開關SA3上的各觸點的通斷情況見表3-1。
表3-1圓工作臺轉換開關SA3觸點通斷情況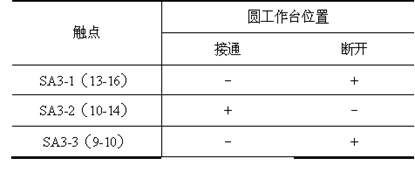
由于SA3-1(13-16)閉合,SA3-2(10-14)斷開,SA3-3(9-10)閉合,所以這時工作臺的縱向、橫向和垂直進給的控制電路如圖3-10所示。
向右運動步驟:
工作臺縱向運動手柄扳到右邊位置,一方面進給電動機的傳動鏈和工作臺縱向移動機構相聯結,另一方面壓下向右進給的微動開關SQ1→常閉觸點SQ1-2(13-15)斷開,同時常開觸點SQ1-1(14-16)閉合→接觸器KM2因線圈通電→進給電動機M3就正向旋轉,拖動工作臺向右移動。
向右進給的控制回路是:
9→SQ5-2→SQ4-2→SQ3-2→SA3-1→SQ1-1→KM2線圈→KM3→21。
向左運動步驟:
將縱向進給手柄向左,一方面進給電動機的傳動鏈和工作臺縱向移動機構相聯結,另一方面壓下向左進給的微動開關SQ2→常閉觸點SQ2-2(10-15)斷開,同時常開觸點SQ2-1(16-19)閉合→接觸器KM3因線圈通電→進給電動機M3就反向轉動→拖動工作臺向左移動。
向左進給的控制回路是:
9→SQ5-2→11→SQ4-2→12→SQ3-2→13→SA3-1→16→SQ2-1→19→KM3線圈→20→KM2→21。
當將縱向進給手柄扳回到中間位置(或稱零位)時,一方面縱向運動的機械機構脫開,另一方面微動開關SQ1和SQ2都復位,其常開觸點斷開,接觸器KM2和KM3釋放,進給電動機M3停止,工作臺也停止。
終端限位保護的實現:在工作臺的兩端各有一塊擋鐵,當工作臺移動到擋鐵碰動縱向進給手柄位置時,會使縱向進給手柄回到中間位置,實現自動停車。這就是終端限位保護。調整擋鐵在工作臺上的位置,可以改變停車的終端位置。
②工作臺橫向(前、后)和垂直(上、下)進給運動的控制分析
條件:圓工作臺轉換開關SA3扳到“斷開”位置,這時的控制線路也如圖3-10所示。
操作手柄:操縱工作臺橫向聯合向進給運動和垂直進給運動的手柄為十字手柄。它有兩個,分別裝在工作臺左側的前、后方。它們之間有機構聯接,只需操縱其中的任意一個即可。手柄有上、下、前、后和零位共五個位置。進給也是由進給電動機M3拖動。
向下或向前控制步驟:
條件:KM1得電,即主軸電動機起動,同時SA3在“斷開”位置。
向下控制:手柄在“下”位置,SQ8被壓,SQ8-1閉合→YC5得電→電動機得傳動機構和垂直方向的傳動機構相連,同時SQ3被壓→KM2得電→M3正轉→工作臺下移。
向上控制:手柄在“上”位置,SQ8被壓,SQ8-1閉合→YC5得電→電動機得傳動機構和垂直方向的傳動機構相連,同時SQ4被壓→KM3得電→M3反轉→工作臺上移。
向前控制:手柄在“前”位置,SQ7被壓,SQ7-1閉合→YC4得電→電動機得傳動機構和橫向傳動機構相連,同時SQ3被壓→KM2得電→M3正轉→工作臺前移。
向后控制:手柄在“后”位置,SQ7被壓,SQ7-1閉合→YC4得電→電動機得傳動機構和橫向傳動機構相連,同時SQ4被壓→KM3得電→M3反轉→工作臺后移。
向下、向前控制回路是:
6→KM1→9→SA3-3→10→SQ2-2→15→SQ1-2→13→SA3-1→16→SQ3-1→KM2線圈→18→KM3→21。
向上、向后控制回路是:
6→KM1→9→SA3-3→10→SQ2-2→15→SQ1-2→13→SA3-1→16→SQ4-1→19→KM3線圈→20→KM2→21。
當手柄回到中間位置時,機械機構都已脫開,各開關也都已復位,接觸器KM2和KM3都已釋放,所以進給電動機M3停止,工作臺也停止。
總結:
向上、下進給時,SQ8閉合→YC5得電,電動機的傳動機構與垂直方向傳動機構相連。
向前、后進給時,SQ7閉合→YC4得電,電動機的傳動機構與橫向傳動機構相連。
向下、前進給時,SQ3閉合→KM2得電→M3得電正轉。
向上、后進給時,SQ4閉合→KM3得電→M3得電反轉。
③工作臺的快速移動
為什么要快速移動?為了縮短對刀時間
快速移動的控制電路如圖3-14所示。
主軸起動以后,將操縱工作臺進給的手柄扳到所需的運動方向,工作臺就按操縱手柄指定的方向作進給運動(進給電機的傳動鏈M與A或B或C相連,見圖3-12)。這時如按下快速移動按鈕SB3或SB4→接觸器KM4線圈通電→KM4常閉觸點(102-108)斷開→進給電磁離合器YC2失電。
同時KM4常開觸點(102-107)閉合→電磁離合器YC3通電,接通快速移動傳動鏈(進給電機的傳動鏈M與a或b或c相連,見圖3-12)。工作臺按原操作手柄指定的方向快速移動。當松開快速移動按鈕SB3或SB4→接觸器KM4因線圈斷電→快速移動電磁離合器YC3斷電,進給電磁離合器YC2得電,工作臺就以原進給的速度和方向繼續移動。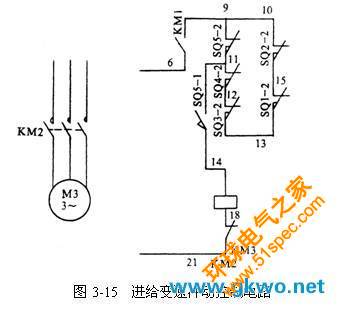
④進給變速沖動
為什么變速沖動?為了使進給變速時齒輪容易嚙合。
變速過程分析:
條件:先起動主軸電動機M1,使接觸器KM1吸合,它在進給變速沖動控制電路中的常開觸點(6-9)閉合。
過程分析:變速時將變速盤往外拉到極限位置,再把它轉到所需的速度,最后將變速盤往里推。在推的過程中擋塊壓一下微動開關SQ5,其常閉觸點SQ5-2(9-11)斷開一下,同時,其常開觸點SQ5-1(11-14)閉合一下,接觸器KM2短時吸合,進給電動機M3就轉動一下。當變速盤推到原位時,變速后的齒輪已順利嚙合。
變速沖動的控制回路是:
6→KM1→9→SA3-3→10→SQ2-2→15→SQ1-2→13→SQ3-2→12→SQ4-2→11→SQ5-1→14→KM2線圈→18→KM3→21。
⑤圓形工作臺時的控制
圓工作臺有什么作用?銑削圓弧和凸輪等曲線。
圓工作臺由進給電動機M3經縱向傳動機構拖動。圓工作臺的控制電路如圖3-16所示。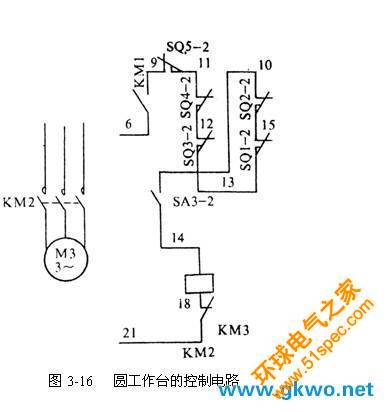
條件1:圓工作臺轉換開關SA3轉到“接通”位置,SA3的觸點SA3-2(13-16)斷開,SA3-2(10-14)閉合,SA3-3(9-10)斷開。
條件2:工作臺的進給操作手柄都扳到中間位置。
按下主軸起動按鈕SB5或SB6→接觸器KM1吸合并自鎖→KM1的常開輔助觸點(6-9)也同時閉合→接觸器KM2也緊接著吸合→進給電動機M3正向轉動,拖動圓工作臺轉動。因為只能接觸器KM2吸合,KM3不能吸合,所以圓工作臺只能沿一個方向轉動。
圓工作臺的控制回路是:
6→KM1→9→SQ5-2→11→SQ4-2→12→SQ3-2→13→SQ1-2→15→SQ2-2→10→SA3-2→14→KM2線圈→18→KM3→21。
⑥進給的聯鎖
a.主軸電動機與進給電動機之間的聯鎖
為什么設置這樣的聯鎖?防止在主軸不轉時,工件與銑刀相撞而損壞機床。
聯鎖的實現方法:在接觸器KM2或KM3線圈回路中串連KM1常開輔助觸點(6-9)。
b.工作臺不能幾個方向同時移動
為什么設置這樣的聯鎖?工作臺兩個以上方向同進給容易造成事故。
聯鎖的實現方法:由于工作臺的左右移動是由一個縱向進給手柄控制,同一時間內不會又向左又向右。工作臺的上、下、前、后是由同一個十字手柄控制,同一時間內這四個方向也只能一個方向進給。所以只要保證兩個操縱手柄都不在零位時,工作臺不會沿兩個方向同時進給即可。
將縱向進給手柄可能壓下的微動開關SQ1和SQ2的常閉觸點SQ1-2(13-15)和SQ2-2(10-15)串聯在一起,再將垂直進給和橫向進給的十字手柄可能壓下的微動開關SQ3和SQ4的常閉觸點SQ3-2(12-13)和SQ14-2(11-12)串聯在一起,并將這兩個串聯電路再并聯起來,以控制接觸器KM2和KM3的線圈通路。如果兩個操作手柄都不在零位,則有不同的支路的兩個微動開關被壓下,其常閉觸點的斷開使兩條并聯的支路都斷開,進給電動機M3因接觸器KM2和KM3的線圈都不能通電而不能轉動。
c.進給變速時兩個進給操縱手柄都必須在零位
為什么設置這樣的聯鎖?為了安全起見,進給變速沖動時不能有進給移動。
聯鎖的實現方法:SQ1或SQ2、SQ3或SQ4的四個常閉觸點SQ1-2、SQ2-2、SQ3-2和SQ4-2串聯在KM2線圈回路。當進給變速沖動時,短時間壓下微動開關SQ5,其常閉觸點SQ5-2(9-11)斷開,其常開觸點SQ5-1(11-14)閉合,如果有一個進給操縱手柄不在零位,則因微動開關常閉觸點的斷開而接觸器KM2不能吸合,進給電動機M3也就不能轉動,防止了進給變速沖動時工作臺的移動。
d.圓工作臺的轉動與工作臺的進給運動不能同時進行
聯鎖的實現方法:SQ1或SQ2、SQ3或SQ4的四個常閉觸點SQ1-2、SQ2-2、SQ3-2或SQ4-2是串聯在KM2線圈的回路中,
當圓工作臺的轉換開關SA3轉到“接通”位置時,兩個進給手柄可能壓下微動開關SQ1或SQ2、SQ3或SQ4的四個常閉觸點SQ1-2、SQ2-2、SQ3-2或SQ4-2。如果有一個進給操縱手柄不在零位,則因開關常閉觸點的斷開而接觸器KM2不能吸合,進給電動機M3不能轉動,圓工作臺也就不能轉動。只有兩個操縱手柄恢復到零位,進給電動機M3方可旋轉,圓工作臺方可轉動。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


